2024 Spatial ComputingSwiftUI & UI Frameworks
WWDC24 · 32 min · Spatial Computing / SwiftUI & UI Frameworks
Dive deep into volumes and immersive spaces
Discover powerful new ways to customize volumes and immersive spaces in visionOS. Learn to fine-tune how volumes resize and respond to people moving around them. Make volumes and immersive spaces interact through the power of coordinate conversions. Find out how to make your app react when people adjust immersion with the Digital Crown, and use a surrounding effect to dynamically customize the passthrough tint in your immersive space experience.
Watch at developer.apple.com ↗Chapters
- 0:00 — Introduction
- 2:04 — Volumes
- 2:06 — Volumes: Baseplate
- 4:08 — Volumes: Size
- 6:59 — Volumes: Toolbars
- 8:48 — Volumes: Ornaments
- 11:36 — Volumes: Viewpoints
- 15:34 — Volumes: World alignment
- 16:52 — Volumes: Dynamic scale
- 18:26 — Intermezzo
- 18:42 — Immersive spaces
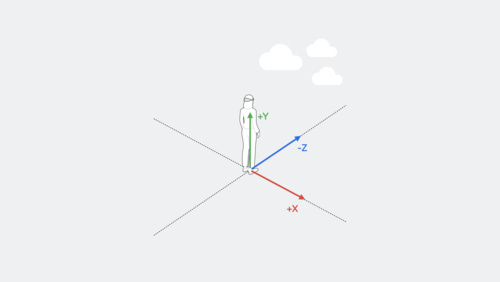
- 19:38 — Immersive spaces: Coordinate conversions
- 22:40 — Immersive spaces: Immersion styles
- 26:08 — Immersive spaces: Anchored UI interactions
- 29:03 — Immersive spaces: Surroundings effects
- 31:21 — Next steps
Code shown on screen · 28 snippets
Baseplate
// Baseplate
WindowGroup(id: "RobotExploration") {
ExplorationView()
.volumeBaseplateVisibility(.visible) // Default!
}
.windowStyle(.volumetric)Enabling resizability
// Enabling resizability
WindowGroup(id: "RobotExploration") {
let initialSize = Size3D(width: 900, height: 500, depth: 900)
ExplorationView()
.frame(minWidth: initialSize.width, maxWidth: initialSize.width * 2,
minHeight: initialSize.height, maxHeight: initialSize.height * 2)
.frame(minDepth: initialSize.depth, maxDepth: initialSize.depth * 2)
}
.windowStyle(.volumetric)
.windowResizability(.contentSize) // Default!Programmatic resize
// Programmatic resize
struct ExplorationView: View {
private var levelScale: Double = 1.0
var body: some View {
RealityView { content in
// Level code here
} update: { content in
appState.explorationLevel?.setScale(
[levelScale, levelScale, levelScale], relativeTo: nil)
}
.frame(width: levelSize.value.width * levelScale,
height: levelSize.value.height * levelScale)
.frame(depth: levelSize.value.depth * levelScale)
.overlay { Button("Change Size") { levelScale = levelScale == 1.0 ? 2.0 : 1.0 } }
}
}Toolbar ornament
// Toolbar ornament
ExplorationView()
.toolbar {
ToolbarItem {
Button("Next Size") {
levelScale = levelScale == 1.0 ? 2.0 : 1.0
}
}
ToolbarItemGroup {
Button("Replay") {
resetExploration()
}
Button("Exit Game") {
exitExploration()
openWindow(id: "RobotCreation")
}
}
}Ornaments
// Ornaments
WindowGroup(id: "RobotExploration") {
ExplorationView()
.ornament(attachmentAnchor: .scene(.topBack)) {
ProgressView()
}
}
.windowStyle(.volumetric)Volume viewpoint
// Volume viewpoint
struct ExplorationView: View {
var body: some View {
RealityView { content in
// Some RealityKit code
}
.onVolumeViewpointChange { oldValue, newValue in
appState.robot?.currentViewpoint = newValue.squareAzimuth
}
}
}Using volume viewpoint
// Volume viewpoint
class RobotCharacter {
func handleMovement(deltaTime: Float) {
if self.robotState == .idle {
characterModel.performRotation(toFace: self.currentViewpoint, duration: 0.5)
self.animationState.transition(to: .wave)
} else {
// Handle normal movement
}
}
}Supported viewpoints
// Supported viewpoints
struct ExplorationView: View {
let supportedViewpoints: Viewpoint3D.SquareAzimuth.Set = [.front, .left, .right]
var body: some View {
RealityView { content in
// Some RealityKit code
}
.supportedVolumeViewpoints(supportedViewpoints)
.onVolumeViewpointChange { _, newValue in
appState.robot?.currentViewpoint = newValue.squareAzimuth
}
}
}Viewpoint update strategy
// Viewpoint update strategy
struct ExplorationView: View {
let supportedViewpoints: Viewpoint3D.SquareAzimuth.Set = [.front, .left, .right]
var body: some View {
RealityView { content in
// Some RealityKit code
}
.supportedVolumeViewpoints(supportedViewpoints)
.onVolumeViewpointChange(updateStrategy: .all) { _, newValue in
appState.robot?.currentViewpoint = newValue.squareAzimuth
if !supportedViewpoints.contains(newValue) {
appState.robot?.animationState.transition(to: .annoyed)
}
}
}
}World alignment
// World alignment
WindowGroup {
ExplorationView()
.volumeWorldAlignment(.gravityAligned)
}
.windowStyle(.volumetric)Dynamic scale
// Dynamic scale
WindowGroup {
ContentView()
}
.windowStyle(.volumetric)
.defaultWorldScalingBehavior(.dynamic)Starting with an empty immersive space
struct BotanistApp: App {
var body: some Scene {
// Volume
WindowGroup(id: "Exploration") {
VolumeExplorationView()
}
.windowStyle(.volumetric)
// Immersive Space
ImmersiveSpace(id: "Immersive") {
EmptyView()
}
}
}Callout to convert function from volume view
// Coordinate conversions
// Convert from RealityKit entity in volume to SwiftUI space
struct VolumeExplorationView: View {
(ImmersiveSpaceAppModel.self) var appModel
var body: some View {
RealityView { content in
content.add(appModel.volumeRoot)
// ...
} update: { content in
guard appModel.convertingRobotFromVolume else { return }
// Convert the robot transform from RealityKit scene space for
// the volume to SwiftUI immersive space
convertRobotFromRealityKitToImmersiveSpace(content: content)
}
}
}Convert robot's transform to SwiftUI immersive space
// Coordinate conversions
// Convert from RealityKit entity in volume to SwiftUI space
func convertRobotFromRealityKitToImmersiveSpace(content: RealityViewContent) {
// Convert the robot transform from RealityKit scene space for
// the volume to SwiftUI immersive space
appModel.immersiveSpaceFromRobot =
content.transform(from: appModel.robot, to: .immersiveSpace)
// Reparent robot from volume to immersive space
appModel.robot.setParent(appModel.immersiveSpaceRoot)
// Handoff to immersive space view to continue conversions.
appModel.convertingRobotFromVolume = false
appModel.convertingRobotToImmersiveSpace = true
}Callout to convert function from immersive space view
// Coordinate conversions
// Convert from SwiftUI immersive space back to RealityKit local space
struct ImmersiveExplorationView: View {
(ImmersiveSpaceAppModel.self) var appModel
var body: some View {
RealityView { content in
content.add(appModel.immersiveSpaceRoot)
} update: { content in
guard appModel.convertingRobotToImmersiveSpace else { return }
// Convert the robot transform from SwiftUI space for the immersive
// space to RealityKit scene space
convertRobotFromSwiftUIToRealityKitSpace(content: content)
}
}
}Compute transform to place robot in matching position in immersive space
// Coordinate conversions
// Calculate transform from SwiftUI to RealityKit scene space
func convertRobotFromSwiftUIToRealityKitSpace(content: RealityViewContent) {
// Calculate transform from SwiftUI immersive space to RealityKit
// scene space
let realityKitSceneFromImmersiveSpace =
content.transform(from: .immersiveSpace, to: .scene)
// Multiply with the robot's transform in SwiftUI immersive space to build a
// transformation which converts from the robot's local
// coordinate space in the volume and ends with the robot's local
// coordinate space in an immersive space.
let realityKitSceneFromRobot =
realityKitSceneFromImmersiveSpace * appModel.immersiveSpaceFromRobot
// Place the robot in the immersive space to match where it
// appeared in the volume
appModel.robot.transform = Transform(realityKitSceneFromRobot)
// Start the jump!
appModel.startJump()
}Customizing immersion
// Customizing immersion
struct BotanistApp: App {
// Custom immersion amounts
private var immersionStyle: ImmersionStyle = .progressive(0.2...1.0, initialAmount: 0.8)
var body: some Scene {
// Immersive Space
ImmersiveSpace(id: "ImmersiveSpace") {
ImmersiveSpaceExplorationView()
}
.immersionStyle(selection: $immersionStyle, in: .mixed, .progressive, .full)
}
}Callout to function to handle immersion amount changed
// Reacting to immersion
struct ImmersiveView: View {
var immersionAmount: Double?
var body: some View {
ImmersiveSpaceExplorationView()
.onImmersionChange { context in
immersionAmount = context.amount
}
.onChange(of: immersionAmount) { oldValue, newValue in
handleImmersionAmountChanged(newValue: newValue, oldValue: oldValue)
}
}
}Handle function to make robot react to changed immersion amount
// Reacting to immersion
func handleImmersionAmountChanged(newValue: Double?, oldValue: Double?) {
guard let newValue, let oldValue else {
return
}
if newValue > oldValue {
// Move the robot outward to react to increasing immersion
moveRobotOutward()
} else if newValue < oldValue {
// Move the robot inward to react to decreasing immersion
moveRobotInward()
}
}Create spatial tracking session
// Create and run spatial tracking session
struct ImmersiveExplorationView {
var spatialTrackingSession: SpatialTrackingSession
= SpatialTrackingSession()
var body: some View {
RealityView { content in
// ...
}
.task {
await runSpatialTrackingSession()
}
}
}Run spatial tracking session
// Create and run the spatial tracking session
func runSpatialTrackingSession() async {
// Configure the session for plane anchor tracking
let configuration =
SpatialTrackingSession.Configuration(tracking: [.plane])
// Run the session to request plane anchor transforms
let _ = await spatialTrackingSession.run(configuration)
}Create a floor anchor to track
// Create a floor anchor to track
struct ImmersiveExplorationView {
var spatialTrackingSession: SpatialTrackingSession
= SpatialTrackingSession()
let floorAnchor = AnchorEntity(
.plane(.horizontal, classification: .floor, minimumBounds: .init(x: 0.01, y: 0.01))
)
var body: some View {
RealityView { content in
content.add(floorAnchor)
}
.task {
await runSpatialTrackingSession()
}
}
}Detect taps on entities in immersive space
// Detect taps on entities in immersive space
RealityView { content in
// ...
}
.gesture(
SpatialTapGesture(
coordinateSpace: .immersiveSpace
)
.targetedToAnyEntity()
.onEnded { value in
handleTapOnFloor(value: value)
}
)Handle tap event to place plant
// Handle tap event
func handleTapOnFloor(value: EntityTargetValue<SpatialTapGesture.Value>) {
let location =
value.convert(value.location3D, from: .immersiveSpace, to: floorAnchor)
plantEntity.position = location
floorAnchor.addChild(plantEntity)
}Add tint color to custom plant component
// Add tint color to custom plant component
struct PlantComponent: Component {
var tintColor: Color {
switch plantType {
case .coffeeBerry:
// Light blue
return Color(red: 0.3, green: 0.3, blue: 1.0)
case .poppy:
// Magenta
return Color(red: 1.0, green: 0.0, blue: 1.0)
case .yucca:
// Light green
return Color(red: 0.2, green: 1.0, blue: 0.2)
}
}
}Handle collisions with robot
// Handle collisions with robot
//
// Handle movement of the robot between frames
func handleMovement(deltaTime: Float) {
// Move character in the collision world
appModel.robot.moveCharacter(by: SIMD3<Float>(...), deltaTime: deltaTime, relativeTo: nil) { collision in
handleCollision(collision)
}
}Set active tint color when colliding with plant
// Set active tint color when colliding with plant
//
// Handle collision between robot and hit entity
func handleCollision(_ collision: CharacterControllerComponent.Collision) {
guard let plantComponent = collision.hitEntity.components[PlantComponent.self] else {
return
}
// Play the plant growth celebration animation
playPlantGrowthAnimation(plantComponent: plantComponent)
if inImmersiveSpace {
appModel.tintColor = plantComponent.tintColor
}
}Apply effect to tint passthrough
// Apply effect to tint passthrough
struct ImmersiveExplorationView: View {
var body: some View {
RealityView { content in
// ...
}
.preferredSurroundingsEffect(surroundingsEffect)
}
// The resolved surroundings effect based on tint color
var surroundingsEffect: SurroundingsEffect? {
if let color = appModel.tintColor {
return SurroundingsEffect.colorMultiply(color)
} else {
return nil
}
}
}Resources
Related sessions
-
 32 min
32 min -
 31 min
31 min